
Das Wort Servomotor (lat.servire oder engl. to serve: dienen) beschreibt grundlegend nicht die Bauart, sondern die Funktion des Motors.
Da Motoren Antriebe sind, beschreibt ein Servomotor (auch: Stellmotor) die Funktion des Hilfs- oder Stellantriebs im Gegensatz zum Hauptantrieb.
Als Servomotor kann man daher prinzipiell jeden (hier: elektrischen) Motor verwenden, der in der Lage ist, eine ausreichend genaue Position zu erreichen.
Die meisten elektrischen Motor-Bauarten benötigen dazu eine elektronische Baugruppe, die laufend eine Information über die Rotorstellung und/oder die Geschwindigkeit erzeugt. Diese Information wird an die Motorsteuerung zurückgemeldet, es entsteht ein Regelkreis. Deswegen meint man mit „Servomotor“ meist einen Motor, der geeignet ist, in einem (geschlossenen) Regelkreis zu arbeiten.
Der viel öfter eingesetzte Schrittmotor wird dagegen umgangssprachlich meist nicht zu den Servomotoren gezählt, obwohl er prinzipiell dieselbe Funktion erfüllt.
Als Motorbauarten für Servomotoren sind Schrittmotoren, Asynchronmotoren, Synchronmotoren, Gleichstrommotoren verbreitet. In der Regel hat der Motor zusätzlich eine elektronische Baugruppe, die ständig Informationen über Position und/oder Geschwindigkeit des Rotors erzeugt. Diese Baugruppe heißt Feedback oder Geber.
Als Motor-Feedbacks findet man Tacho-Generatoren, Resolver, Impulsgeber, Sinusgeber, Lagegeber und Kombinationen davon. Technisch veraltet sind mittlerweile Impulsdrahtgeber und Hall-Geber.
Es gibt zahlreiche Kombinationsmöglichkeiten zwischen Motorarten und Feedback-Arten.
Weil der Servomotor eine präzise Position erreichen soll, benötigt er immer eine übergeordnete Regelung, die Befehle entgegen nimmt, Sollwert mit Istwert vergleicht und einen für den Motor geeigneten Stromwert liefert. Diese Regelung heißt Controller, Servoverstärker oder Regler.
Eine Ausnahme bildet der Schrittmotor. Weil die Bewegung des Schrittmotors hinreichend genau der von der Steuerung gelieferten Schrittzahl entspricht, wird – in der Regel – auf ein Feedback verzichtet.
Anwendungen für Servoantriebe
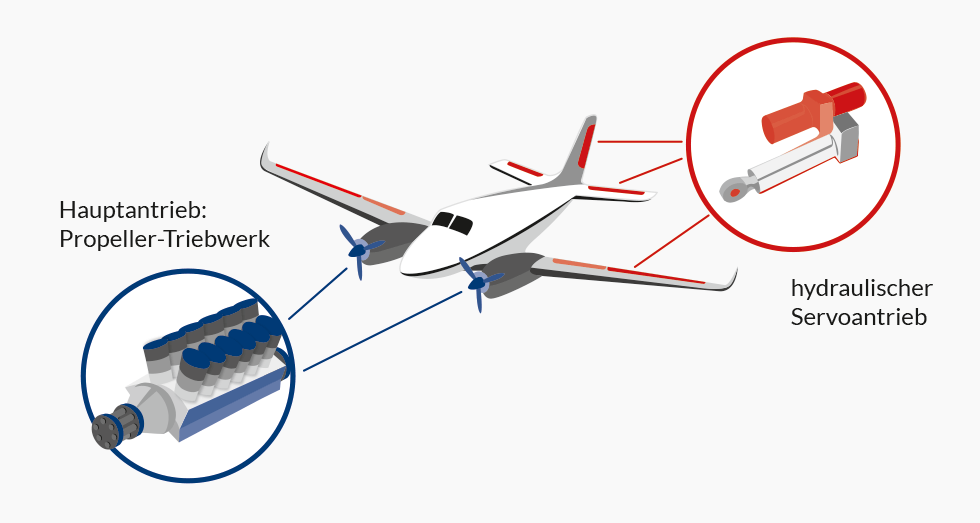 Flugzeug: Propellertriebwerk (=Hauptantrieb) Antrieb für Klappen, Seitenruder (=Stell- oder Servoantriebe)
Flugzeug: Propellertriebwerk (=Hauptantrieb) Antrieb für Klappen, Seitenruder (=Stell- oder Servoantriebe)
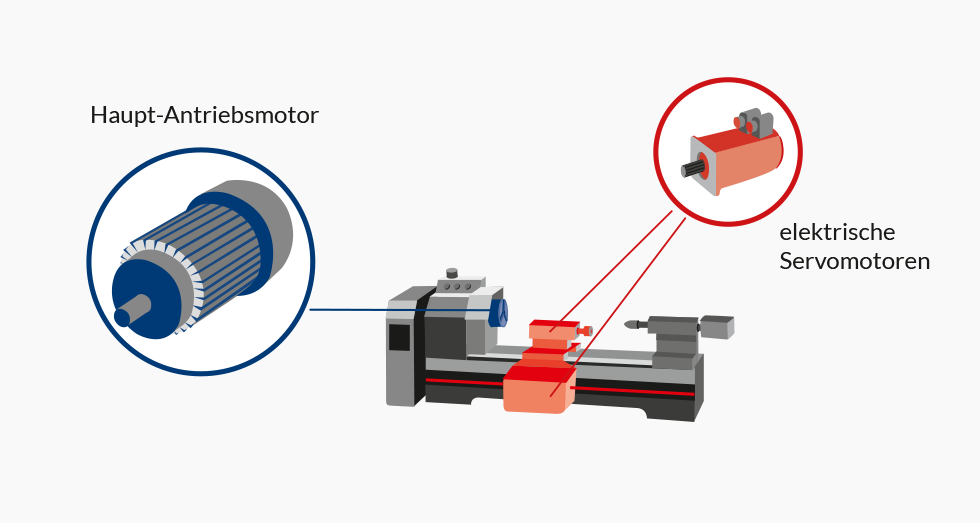 Drehmaschine: Arbeitsspindel (=Hauptantrieb) , X-, Y-Achse (=Servoantrieb)
Drehmaschine: Arbeitsspindel (=Hauptantrieb) , X-, Y-Achse (=Servoantrieb)
Begriff „elektronisch kommutierter Gleichstrom-Motor“
Der Begriff „elektronisch kommutierter Gleichstrom-Motor“ ist eigentlich falsch. In der Regel handelt es sich um Synchronmotoren, die nicht an Gleichstrom betrieben werden können. Vielmehr benötigen sie eine Ansteuer-Elektronik, die lediglich von einem DC-Zwischenkreis gespeist wird.
Der Begriff „EC-Motor“ wird meist für Kleinstmotoren verwendet, die aus einem Synchronmotor und einer im Motor eingebauten Ansteuer-Elektronik bestehen. Diese verhalten sich beim Anlegen einer Gleichspannung ähnlich einem echten Gleichstrom-Motor.
